“AUV” stands for autonomous underwater vehicle; at their most fundamental level, AUVs are simply computer-controlled systems operating undersea.
AUVs are unmanned underwater robots akin to the Curiosity rover NASA uses on Mars. As their (autonomous) name suggests, AUVs operate independently of humans. AUVs have no physical connection to their operator, who may be on shore or aboard a ship. Rather, AUVs are self-guiding and self-powered vehicles.
AUVs may glide from the sea surface to ocean depths and back. Others can stop, hover, and move like blimps or helicopters do through the air. Solar-powered AUVs can spend a portion of their time at the surface, blurring the distinction between undersea and surface vehicles.
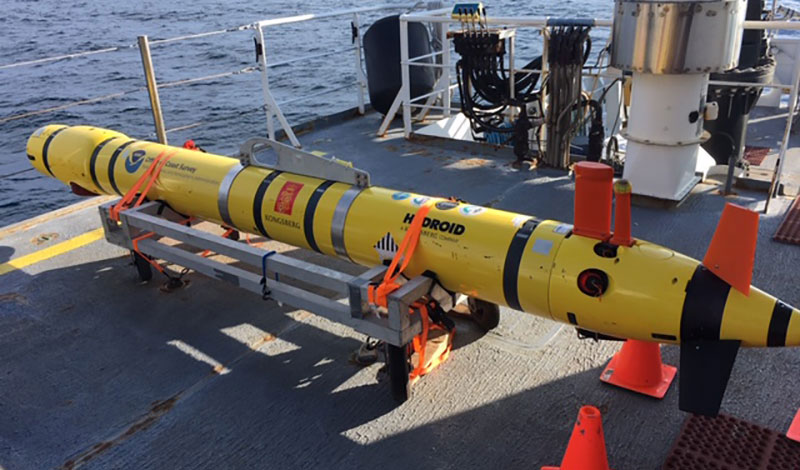
AUV systems can be small, easily portable vehicles under 100 pounds or they can be long-endurance gliders or very large systems. The largest AUVs in service weigh thousands of pounds and require their own dedicated support vessels.
Fully autonomous operations carry power onboard. Power enables propellers or thrusters to move an AUV through the water and is necessary to operate sensors on the AUV. Most AUVs use specialized batteries, although some AUVs have used fuel cells or rechargeable solar power. Certain AUVs, such as gliders, minimize energy demands by allowing gravity and buoyancy to propel them.
AUVs are attractive options for ocean-based research. AUVs can reach shallower water than boats can and deeper water than human divers or tethered vehicles can. Once deployed and underwater, AUVs are safe from bad weather. They are also scalable, or modular, meaning that scientists can choose which sensors to attach to them depending on their research objectives. AUVs are also less expensive than research vessels, but they can complete identical repeat surveys of an area.
Scientists can use sensors on an AUV to create maps of the ocean floor, record environmental information, sense what humans have left behind, identify hazards to navigation, explore geologic formations, and more.